Você já se perguntou como robôs conseguem “enxergar” o ambiente ao seu redor sem usar câmeras? A resposta muitas vezes está nos sensores ultrassônicos, pequenos dispositivos que utilizam ondas sonoras para medir distâncias e detectar obstáculos. Eles são amplamente usados em projetos de engenharia e robótica, como carrinhos autônomos e sistemas de automação. Para estudantes de engenharia eletrônica ou robótica, entender como esses sensores funcionam é um passo essencial para criar projetos incríveis. Neste artigo, vamos explorar os sinais Trigger e Echo, que são o coração do funcionamento desses sensores.
O sensor ultrassônico opera como um sonar, enviando ondas sonoras e captando seus ecos para calcular distâncias. Ele é composto por pinos específicos, como o Trigger, que inicia a medição, e o Echo, que retorna o resultado. Compreender esses sinais é fundamental para programar microcontroladores como o Arduino e aplicá-los em projetos práticos. Se você está começando na eletrônica ou quer aprimorar suas habilidades em robótica, este guia didático vai te ajudar a dominar o uso desses sensores de forma clara e prática.
Pronto para mergulhar no mundo dos sensores ultrassônicos e transformar suas ideias em realidade? Este artigo vai te guiar passo a passo, desde os conceitos básicos até aplicações práticas, com dicas e exemplos que qualquer estudante pode aplicar. Continue acompanhando para aprender como os sinais Trigger e Echo podem ser seus aliados em projetos de engenharia e robótica!
O que é um Sensor Ultrassônico?
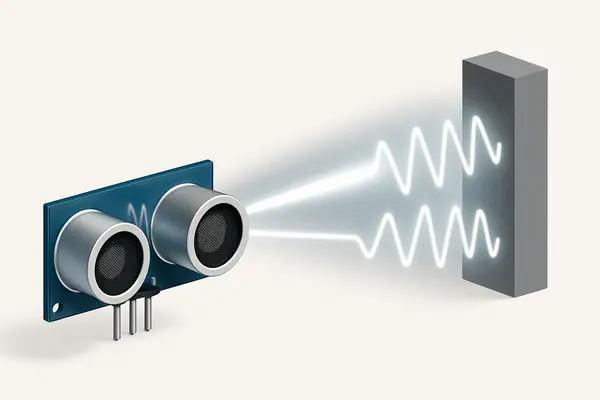
Um sensor ultrassônico é um dispositivo eletrônico que mede distâncias utilizando ondas sonoras de alta frequência, geralmente acima de 20 kHz, que são inaudíveis para o ouvido humano. Ele funciona emitindo uma onda sonora por meio de um transdutor (o “alto-falante” do sensor) e captando o eco refletido por um objeto com um receptor (o “microfone”). A diferença de tempo entre o envio e a recepção da onda permite calcular a distância com base na velocidade do som no ar, que é aproximadamente 343 m/s em condições normais.
Esses sensores são amplamente utilizados em projetos de engenharia e robótica devido à sua simplicidade, baixo custo e precisão. Por exemplo, o sensor HC-SR04, um dos modelos mais populares, é frequentemente encontrado em projetos de estudantes, como robôs que evitam obstáculos ou sistemas de medição de nível de líquidos. Sua versatilidade o torna ideal para aplicações em carrinhos autônomos, drones e até sistemas de automação residencial, como portas automáticas. Para entender como ele funciona, é crucial dominar os sinais Trigger e Echo, que veremos a seguir.
Os sensores ultrassônicos têm uma história interessante. Inspirados nos sonares usados em submarinos, eles foram adaptados para aplicações terrestres no final do século XX. Hoje, são indispensáveis em áreas como robótica, automação industrial e Internet das Coisas (IoT). Para estudantes, aprender a usar esses sensores é uma porta de entrada para o mundo da eletrônica, pois combinam conceitos de física, programação e engenharia prática.
Como Funcionam os Sinais Trigger e Echo
Os sinais Trigger e Echo são os pilares do funcionamento de um sensor ultrassônico. Vamos descomplicar: o pino Trigger é responsável por iniciar a medição, enquanto o pino Echo retorna o resultado. O processo é simples, mas fascinante. Primeiro, o microcontrolador (como um Arduino) envia um pulso elétrico de 10 microssegundos ao pino Trigger. Isso faz o sensor emitir um conjunto de ondas ultrassônicas (geralmente 8 pulsos a 40 kHz). Essas ondas viajam pelo ar, atingem um objeto e voltam como um eco.
Quando o eco retorna, o sensor ativa o pino Echo, que envia um sinal ao microcontrolador. O tempo que o sinal Echo permanece “alto” (em nível lógico 1) corresponde ao tempo que a onda levou para ir e voltar. Para calcular a distância, usamos a fórmula:
Distância = (Tempo do Echo × Velocidade do Som) ÷ 2
O fator “÷ 2” é necessário porque a onda percorre a distância duas vezes (ida e volta). Por exemplo, se o tempo medido pelo Echo for 294 microssegundos, a distância será:
Distância = (294 × 10⁻⁶ s × 343 m/s) ÷ 2 ≈ 5 cm
Esse cálculo é feito automaticamente pelo microcontrolador com base no código programado. Para visualizar, imagine o sensor como um morcego usando ecolocalização: ele “grita” (Trigger) e “escuta” o eco (Echo) para entender o ambiente. Para mais detalhes sobre a física do som, confira este artigo da Khan Academy.
Componentes e Configuração de um Sensor Ultrassônico
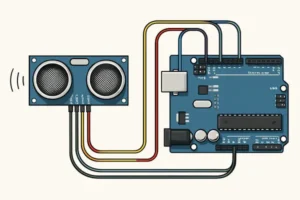
Um sensor ultrassônico, como o HC-SR04, possui quatro pinos principais: VCC (alimentação, geralmente 5V), GND (terra), Trigger (entrada de sinal) e Echo (saída de sinal). Além disso, ele contém um transdutor ultrassônico para emitir ondas e um receptor para captar os ecos. Configurá-lo em um projeto é relativamente simples, mas requer atenção aos detalhes.
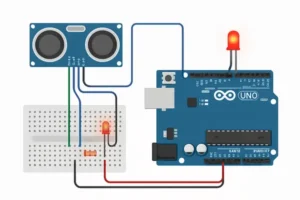
Para conectar o sensor a um microcontrolador como o Arduino, siga estes passos:
- Conecte o VCC a uma fonte de 5V no Arduino.
- Conecte o GND ao pino de terra do Arduino.
- Conecte o Trigger a um pino digital (por exemplo, D9).
- Conecte o Echo a outro pino digital (por exemplo, D10).
Um exemplo de código básico em Arduino para ler a distância é:
cppCollapseWrapCopy
#define TRIGGER_PIN 9
#define ECHO_PIN 10
void setup() {
pinMode(TRIGGER_PIN, OUTPUT);
pinMode(ECHO_PIN, INPUT);
Serial.begin(9600);
}
void loop() {
digitalWrite(TRIGGER_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIGGER_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIGGER_PIN, LOW);
long duration = pulseIn(ECHO_PIN, HIGH);
float distance = (duration * 0.0343) / 2;
Serial.print("Distância: ");
Serial.print(distance);
Serial.println(" cm");
delay(1000);
}
Esse código envia um pulso ao Trigger, mede o tempo do Echo e calcula a distância em centímetros. Para mais exemplos de código, consulte a documentação oficial do Arduino.
Aplicações Práticas em Projetos de Robótica
Os sensores ultrassônicos brilham em projetos de robótica, especialmente para estudantes que estão construindo seus primeiros protótipos. Um exemplo clássico é o carrinho autônomo que evita obstáculos. Nesse projeto, o sensor ultrassônico mede a distância até objetos à frente do carrinho. Se a distância for menor que um limite (por exemplo, 20 cm), o carrinho para ou muda de direção. Para implementar isso, você pode usar um Arduino, dois motores DC, um driver de motor (como o L298N) e o sensor HC-SR04.
Outro projeto interessante é um sistema de medição de nível de líquidos. Por exemplo, você pode usar o sensor para monitorar o nível de água em um tanque, enviando alertas quando ele estiver baixo. O sensor mede a distância até a superfície do líquido, e um código simples converte essa medição em volume. Esses projetos são perfeitos para estudantes, pois combinam eletrônica, programação e criatividade.
Para começar, experimente este projeto simples: configure o sensor para acender um LED quando um objeto estiver a menos de 10 cm. Use o código acima como base e adicione uma condição para controlar o LED. Sites como Instructables oferecem tutoriais detalhados para projetos semelhantes.
Dicas para Otimizar o Uso do Sensor Ultrassônico
Para obter os melhores resultados com sensores ultrassônicos, siga estas dicas práticas:
- Evite interferências: Superfícies macias, como tecidos, absorvem ondas ultrassônicas, enquanto superfícies muito lisas podem causar reflexões indesejadas. Teste o sensor com objetos sólidos e planos.
- Calibre o sensor: A velocidade do som varia com a temperatura (aumenta em ambientes quentes). Use a fórmula ajustada se necessário: Velocidade do som = 331,4 + (0,606 × temperatura em °C).
- Use delays adequados: Após cada medição, espere pelo menos 60 ms para evitar ecos residuais.
- Proteja o circuito: Use resistores ou divisores de tensão se conectar o Echo a microcontroladores de 3,3V, como o ESP32.
- Teste em ambientes controlados: Evite locais com muito ruído ultrassônico, como ventiladores ou motores.
Essas práticas ajudam a garantir leituras precisas e confiáveis. Para mais dicas sobre eletrônica, confira o Fórum da Comunidade Arduino.
Erros Comuns e Como Evitá-los
Estudantes iniciantes podem enfrentar alguns desafios ao usar sensores ultrassônicos. Aqui estão os erros mais comuns e como resolvê-los:
- Leituras imprecisas: Verifique se os pinos Trigger e Echo estão conectados corretamente. Um cabo solto pode causar resultados erráticos.
- Interferência de superfícies: Evite testar o sensor em superfícies macias ou irregulares. Use objetos sólidos para testes iniciais.
- Alimentação inadequada: Certifique-se de que o VCC está recebendo 5V estáveis. Uma fonte fraca pode afetar o desempenho.
- Código mal configurado: Verifique se o tempo do pulso Trigger é de 10 microssegundos e se o delay entre medições é suficiente.
- Limitações de alcance: O HC-SR04 tem um alcance típico de 2 cm a 4 m. Objetos muito próximos ou distantes podem gerar erros.
Resolver esses problemas é parte do aprendizado. Teste seu projeto em etapas e use o monitor serial do Arduino para depurar.
Conclusão
Dominar os sinais Trigger e Echo de um sensor ultrassônico é um passo fundamental para qualquer estudante de engenharia eletrônica ou robótica. Esses dispositivos simples, mas poderosos, abrem um mundo de possibilidades, desde robôs autônomos até sistemas de automação. Com este guia, você aprendeu como os sensores funcionam, como configurá-los e como aplicá-los em projetos práticos. Agora é hora de colocar a mão na massa! Pegue seu Arduino, conecte um sensor HC-SR04 e comece a experimentar. Cada projeto é uma oportunidade de aprender e criar algo novo.
Perguntas Frequentes
- Qual é a diferença entre os pinos Trigger e Echo?
O pino Trigger envia um pulso para iniciar a emissão de ondas ultrassônicas, enquanto o pino Echo mede o tempo que o eco leva para retornar, permitindo calcular a distância. - Posso usar um sensor ultrassônico em ambientes externos?
Sim, mas ventos fortes ou superfícies irregulares podem afetar a precisão. Teste em condições controladas e ajuste o código para compensar interferências. - O sensor ultrassônico funciona com líquidos?
Sim, ele pode medir o nível de líquidos em tanques, desde que a superfície seja lisa e reflexiva. Evite líquidos espumosos, que podem absorver as ondas. - Qual é o alcance máximo do HC-SR04?
O HC-SR04 tem um alcance típico de 2 cm a 4 metros, dependendo das condições do ambiente e da superfície do objeto. - Como integrar o sensor com outros microcontroladores além do Arduino?
Sensores ultrassônicos são compatíveis com microcontroladores como ESP32 ou Raspberry Pi. A lógica é semelhante, mas ajuste os níveis de tensão e os tempos do código conforme necessário.