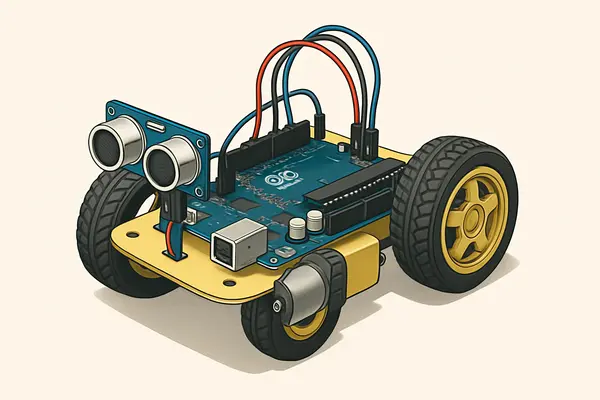
Você já pensou em construir um carrinho que desvia de obstáculos sozinho, usando apenas componentes simples e acessíveis? Se a resposta for sim, você está no lugar certo. Neste tutorial completo, vamos montar juntos um carrinho autônomo com Arduino e sensores de proximidade ultrassônicos, perfeito para quem está começando na robótica DIY.
O projeto é divertido, educativo e uma porta de entrada incrível para entender como funcionam sistemas embarcados e lógica de programação no mundo real. Mesmo que você nunca tenha montado nada parecido, com calma e foco você será capaz de ver seu carrinho funcionando em poucas horas.
Este guia foi feito pensando em você, que gosta de pôr a mão na massa, experimentar, aprender e ver resultados. Vamos montar passo a passo, com explicações claras e dicas valiosas. 🚗💡 Vamos nessa?
Materiais Necessários
Antes de começarmos a montagem do carrinho, é importante garantir que você tenha todos os componentes em mãos. Esse projeto foi pensado para ser acessível, utilizando peças fáceis de encontrar no mercado nacional ou em lojas online especializadas em eletrônica.
Aqui está a lista completa de materiais que você vai precisar:
🔌 Componentes eletrônicos:
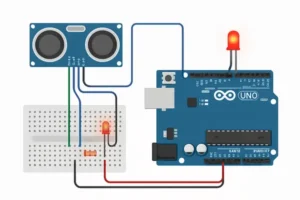
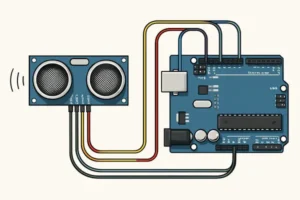
- 1 Arduino UNO (ou compatível)
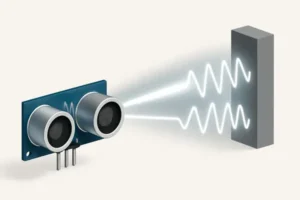
O cérebro do carrinho. Controla os sensores e os motores. - 1 Sensor ultrassônico HC-SR04
Responsável por detectar obstáculos à frente e enviar as informações ao Arduino. - 1 Módulo L298N (driver de motor)
Controla a direção e velocidade dos motores DC. - 2 Motores DC com caixa de redução (6V ou 12V)
Ideais para movimentar o carrinho com torque suficiente. - 2 Rodas plásticas compatíveis com os motores
Fixadas nos eixos dos motores. - 1 Roda boba (castor ball)
Usada como apoio frontal ou traseiro para estabilidade. - 1 Protoboard pequena (opcional)
Para facilitar conexões temporárias durante testes. - Cabos jumper macho-macho e macho-fêmea
Para interligar os componentes e o Arduino. - 1 Porta-pilhas 4xAA (com chave liga/desliga)
Alimenta o conjunto de motores e o driver L298N. - 4 Pilhas AA alcalinas ou recarregáveis (mín. 1.2V)
Para alimentar o sistema de propulsão. - 1 Power bank ou cabo USB (opcional)
Pode ser usado para alimentar o Arduino separadamente.
Estrutura física (chassi):
Você pode optar por:
- Chassi pronto para robô 2WD (duas rodas motrizes)
Vendido em kits e já vem com suportes e furos para componentes.
OU
- Chassi caseiro feito com MDF, acrílico ou papelão rígido
Basta recortar uma base e adaptar os suportes com cola quente ou parafusos.
🛠️ Ferramentas úteis:
- Chave de fenda pequena
- Cola quente ou fita dupla face
- Estilete ou tesoura
- Multímetro (opcional, para testes de tensão)
💡 Dica: Ao comprar os componentes, confira se os conectores dos motores e sensores são compatíveis com o Arduino UNO. Alguns kits já vêm com todos os itens, o que facilita bastante para iniciantes.
Código Arduino Explicado
Abaixo está o código completo que fará seu carrinho desviar de obstáculos automaticamente usando o sensor ultrassônico. Ele foi escrito de forma simples e clara, ideal para iniciantes. Depois do código, vamos analisar cada parte em detalhes.
✅ Código completo:
cppCopiarEditar// Definições de pinos do motor #define IN1 8 #define IN2 9 #define IN3 10 #define IN4 11 // Definições de pinos do sensor ultrassônico #define TRIG 6 #define ECHO 7 void setup() { // Configura os pinos dos motores como saída pinMode(IN1, OUTPUT); pinMode(IN2, OUTPUT); pinMode(IN3, OUTPUT); pinMode(IN4, OUTPUT); // Configura os pinos do sensor como saída/entrada pinMode(TRIG, OUTPUT); pinMode(ECHO, INPUT); // Inicia a comunicação serial (opcional para debug) Serial.begin(9600); } void loop() { long duracao, distancia; // Gera um pulso no TRIG digitalWrite(TRIG, LOW); delayMicroseconds(2); digitalWrite(TRIG, HIGH); delayMicroseconds(10); digitalWrite(TRIG, LOW); // Mede o tempo do retorno do sinal no ECHO duracao = pulseIn(ECHO, HIGH); // Calcula a distância em centímetros distancia = duracao * 0.034 / 2; // Mostra a distância no monitor serial Serial.print("Distancia: "); Serial.print(distancia); Serial.println(" cm"); // Lógica de movimentação if (distancia > 20) { // Se não há obstáculo próximo, segue em frente frente(); } else { // Se há obstáculo, para e recua um pouco, depois gira parar(); delay(300); re(); delay(400); direita(); // pode ser 'esquerda();' para variar delay(500); } } void frente() { digitalWrite(IN1, HIGH); digitalWrite(IN2, LOW); digitalWrite(IN3, HIGH); digitalWrite(IN4, LOW); } void re() { digitalWrite(IN1, LOW); digitalWrite(IN2, HIGH); digitalWrite(IN3, LOW); digitalWrite(IN4, HIGH); } void esquerda() { digitalWrite(IN1, LOW); digitalWrite(IN2, HIGH); digitalWrite(IN3, HIGH); digitalWrite(IN4, LOW); } void direita() { digitalWrite(IN1, HIGH); digitalWrite(IN2, LOW); digitalWrite(IN3, LOW); digitalWrite(IN4, HIGH); } void parar() { digitalWrite(IN1, LOW); digitalWrite(IN2, LOW); digitalWrite(IN3, LOW); digitalWrite(IN4, LOW); }🧠 Explicação do código:
🔸 Definições dos pinos:
No início, usamos
#definepara facilitar a leitura e manutenção. Assim, se você quiser mudar o pino de um componente, só precisa alterar uma linha.🔸
setup()Aqui configuramos os pinos como entrada ou saída, e iniciamos a comunicação serial, útil para verificar a leitura do sensor no monitor serial do Arduino IDE.
🔸
loop()O coração do código. Ele:
- Envia um pulso ultrassônico pelo pino TRIG.
- Mede quanto tempo demora para o eco voltar ao pino ECHO.
- Calcula a distância em centímetros.
- Verifica se há um obstáculo a menos de 20 cm.
- Se não há obstáculo, o carrinho anda para frente.
- Se há obstáculo, ele para, anda para trás e gira para desviar.
🔸 Funções auxiliares:
Criamos funções como
frente(),re(),direita()eparar()para tornar o código mais organizado e reutilizável. Isso facilita ajustes futuros e deixa o loop principal mais limpo.💡 Dica: se quiser que o carrinho seja mais reativo ou tome decisões diferentes, basta alterar os valores no
if (distancia > 20)ou mudar os tempos dosdelay().
Ajustes e Testes Iniciais
Antes de ver seu carrinho autônomo em ação, é importante fazer alguns testes e pequenos ajustes para garantir que tudo funcione corretamente. Essa etapa é fundamental para evitar frustrações e obter os melhores resultados com seu projeto.
🔌 1. Verifique todas as conexões
Antes de ligar qualquer coisa:
- Confira se todos os fios estão bem conectados.
- Verifique a polaridade das pilhas.
- Certifique-se de que o sensor ultrassônico está virado para frente, em posição horizontal.
- Se estiver usando uma protoboard, veja se não há fios soltos ou invertidos.
⚡ 2. Alimente o circuito corretamente
Você pode alimentar o Arduino de duas formas:
- Via USB (conectado ao computador ou power bank): recomendado para testes iniciais, pois permite visualizar o monitor serial.
- Via módulo L298N com pilhas: certifique-se de que as pilhas estão novas ou carregadas.
Evite alimentar o Arduino diretamente das pilhas, pois se estiverem fracas, o comportamento pode ser instável.
🖥️ 3. Use o monitor serial para depurar
Abra o Monitor Serial na IDE do Arduino (menu “Ferramentas” > “Monitor Serial”) e defina a velocidade para 9600 baud. Você deve ver algo assim:
makefileCopiarEditarDistancia: 38 cm
Distancia: 42 cm
Distancia: 15 cm
Se os valores estiverem aparecendo de forma errática (muito altos ou zeros), algo pode estar errado com a fiação do sensor HC-SR04.
🛠️ 4. Ajuste a distância mínima no código
O valor 20 cm no código define quando o carrinho deve desviar de um obstáculo. Você pode experimentar outros valores:
15 cmpara maior agilidade25 cmpara maior cautela
Ajuste esta linha no código:
cppCopiarEditarif (distancia > 20) {
🔄 5. Calibração do movimento
Se o carrinho:
- Anda em círculos: provavelmente os motores não têm o mesmo torque. Tente trocar as posições ou calibrar com
delay()diferentes nos giros. - Gira sempre para o mesmo lado: mude a função de desvio de
direita();paraesquerda();ou adicione uma lógica aleatória se quiser mais variação. - Fica parado mesmo sem obstáculos: verifique se a leitura de distância está correta e se os motores estão realmente recebendo sinal.
🧪 Teste básico:
Coloque seu carrinho em uma superfície plana, como uma mesa, chão ou bancada, e posicione obstáculos na frente (como caixas ou livros). Assim que ele detectar algo a menos de 20 cm, ele deve:
- Parar
- Recuar um pouco
- Virar para um lado
- Seguir em frente novamente
💡 Dica: use obstáculos de tamanho médio e altura suficiente para que o sensor detecte corretamente — objetos muito baixos ou inclinados podem não refletir bem o sinal ultrassônico.
Solução de Problemas Comuns
Mesmo com todos os passos seguidos corretamente, é normal que surjam pequenos problemas. Abaixo estão os erros mais comuns enfrentados por quem monta um carrinho autônomo com Arduino — e como resolvê-los com rapidez.
❌ 1. O carrinho não liga ou não se move
Possíveis causas:
- Pilhas descarregadas
- Fios de alimentação soltos
- Jumper de 5V mal conectado no L298N
- Arduino não alimentado corretamente
Soluções:
- Verifique as pilhas (use um multímetro, se possível).
- Confirme se os fios do porta-pilhas estão bem presos no módulo L298N.
- Teste a alimentação via cabo USB antes de usar pilhas.
- Se necessário, alimente o Arduino separadamente por power bank.
❌ 2. O sensor ultrassônico sempre mostra “0 cm” ou valores incorretos
Possíveis causas:
- Fios TRIG/ECHO invertidos
- Sensor mal conectado ou danificado
- Objeto fora do alcance ou muito pequeno para ser detectado
Soluções:
- Verifique se o TRIG está no pino 6 e o ECHO no pino 7 do Arduino.
- Use o monitor serial para confirmar as leituras.
- Teste com um objeto maior e mais plano (como uma caixa ou caderno).
❌ 3. O carrinho gira só para um lado ou anda em círculos
Possíveis causas:
- Um motor está mais fraco ou com polaridade invertida
- Roda travando ou mal encaixada
- Diferença no torque entre os motores
Soluções:
- Troque a posição dos fios no L298N (OUT1-OUT2 ou OUT3-OUT4).
- Lubrifique ou reposicione as rodas.
- Adicione
delay()ajustados para balancear o tempo de rotação.
❌ 4. O carrinho anda para trás quando deveria ir para frente
Causa provável:
- Fios dos motores estão invertidos
Solução:
- Inverta os fios de um motor de cada vez no módulo L298N até que o movimento fique correto.
❌ 5. O Arduino reinicia ao ligar os motores
Possíveis causas:
- Pico de consumo de corrente dos motores
- Falta de alimentação isolada para o Arduino
Soluções:
- Alimente o Arduino com fonte separada (via USB ou power bank).
- Use capacitores eletrolíticos no circuito para estabilizar a corrente.
💡 Dica extra: Teste cada parte do projeto separadamente. Por exemplo, rode apenas o código do sensor, depois só o dos motores. Isso ajuda a isolar os problemas.
A resolução de problemas faz parte do processo de aprendizado. Com cada ajuste, você ganha mais domínio sobre eletrônica, programação e lógica de controle.
Possíveis Melhorias e Expansões
Criar um carrinho autônomo simples é só o começo. A beleza da robótica DIY com Arduino está na possibilidade de expandir seus projetos conforme seu aprendizado e criatividade aumentam. Aqui estão algumas ideias para turbinar seu carrinho e transformar esse projeto em algo mais robusto e avançado.
🧭 1. Adicionar mais sensores ultrassônicos (laterais ou traseiros)
Com apenas um sensor frontal, o carrinho só “enxerga” o que está à frente. Adicionando sensores nas laterais ou atrás, você pode:
- Detectar obstáculos em múltiplas direções
- Criar lógica para escolher o melhor caminho
- Evitar colisões em ambientes apertados
Sugestão: conecte sensores nas laterais e modifique o código para comparar distâncias e escolher para onde girar com base em espaço livre.
🔄 2. Usar servo motor para movimentar o sensor
Montar o sensor HC-SR04 sobre um servo motor 180° permite que ele escaneie o ambiente de um lado para o outro. Com isso, o carrinho pode:
- Medir distâncias em diferentes ângulos
- Construir um “mapa” simples ao redor
- Tomar decisões mais inteligentes de desvio
Exemplo de função: “se a esquerda estiver mais livre que a direita, virar para a esquerda”.
🌱 3. Adicionar sensores infravermelhos (IR) para seguir linha
Você pode combinar o desvio de obstáculos com a capacidade de seguir uma linha preta no chão, usando sensores infravermelhos. Isso transforma seu carrinho em:
- Um robô de linha com inteligência de desvio
- Um sistema com comportamento híbrido (navegação + trajeto)
📱 4. Controle via Bluetooth (ou Wi-Fi)
Instalar um módulo HC-05 Bluetooth ou ESP8266/ESP32 permitirá controlar o carrinho com seu smartphone ou até remotamente pela internet. Você pode:
- Ativar/desativar o modo autônomo
- Mudar a direção com comandos manuais
- Criar um painel no celular com botões virtuais
🎯 5. Detecção de cor ou luz ambiente
Adicionar um sensor de cor (como o TCS3200) ou sensor de luz LDR pode fazer o carrinho responder a estímulos visuais, como:
- Parar em áreas escuras ou claras
- Ativar luzes LED ao detectar baixa luminosidade
- Reconhecer cores no caminho
🔋 6. Monitoramento de bateria
Adicionar um divisor de tensão conectado a uma entrada analógica do Arduino permite que você monitore a carga das pilhas. Com isso, o carrinho pode:
- Avisar (via buzzer ou LED) quando a bateria estiver fraca
- Parar para evitar danos por subcarga
🧠 7. Uso de IA e aprendizado de máquina (com ESP32 ou Raspberry Pi)
Para os mais avançados, é possível usar câmeras e redes neurais leves para:
- Reconhecer objetos
- Seguir rostos ou cores específicas
- Aprender rotas por reforço
Esses upgrades exigem mais processamento e conhecimento em Python, OpenCV e inteligência artificial.
💡 Dica de ouro: sempre que for adicionar novos componentes, vá devagar. Teste uma melhoria por vez e mantenha backups do código original. Isso evita frustrações e ajuda a identificar falhas com mais facilidade.
Seu projeto pode crescer o quanto você quiser. A robótica com Arduino é um campo de experimentação ilimitado — basta curiosidade, criatividade e paciência.
Conclusão
Montar um carrinho autônomo simples com Arduino e sensor de proximidade é mais do que um projeto divertido — é uma porta de entrada poderosa para o universo da robótica, eletrônica e programação embarcada. Com poucos componentes e um pouco de paciência, você viu como é possível construir um sistema funcional e inteligente, capaz de detectar obstáculos e reagir em tempo real.
Mais importante ainda, esse tipo de projeto estimula habilidades como lógica, resolução de problemas, pensamento criativo e persistência. A cada erro corrigido ou melhoria implementada, você dá um passo além como maker, hobbysta ou até mesmo futuro profissional da área.
Agora que seu carrinho está pronto e funcionando, por que parar por aqui? Existem infinitas possibilidades de expansão e customização. Explore novos sensores, integre comunicação sem fio, adicione comportamentos diferentes. Continue testando, programando, errando e melhorando. 🚀
Seu próximo projeto começa agora. Vamos juntos nessa jornada maker?
❓ FAQ – Perguntas Frequentes
1. Posso usar outro tipo de sensor no lugar do HC-SR04?
Sim. Embora o HC-SR04 seja ideal para iniciantes, você pode usar sensores infravermelhos ou LIDAR para detecção de obstáculos com características diferentes (ex: sensibilidade à luz ou maior alcance).
2. O que fazer se os motores não giram mesmo com alimentação correta?
Verifique se o módulo L298N está bem alimentado (com pelo menos 6V), e se os fios dos motores estão bem fixos. Também revise as conexões dos pinos de controle do Arduino.
3. Como posso alterar a velocidade dos motores?
Você pode usar as entradas ENA e ENB do módulo L298N conectadas a pinos PWM do Arduino e usar analogWrite() para controlar a velocidade. Isso exige pequenas modificações no código.
4. Esse projeto funciona com Arduino Nano ou Mega?
Sim! Basta adaptar os pinos no código conforme as entradas disponíveis nesses modelos. O Nano, em especial, é excelente para projetos compactos.
5. É possível usar esse carrinho para competições de robótica?
Sim, mas para isso é recomendável adicionar mais inteligência ao sistema, como múltiplos sensores, controle de velocidade, sensores de linha ou até integração com módulos Bluetooth ou câmera.