Construir um robô educacional com sensor ultrassônico representa o primeiro passo definitivo para qualquer maker que deseja mergulhar no universo da robótica prática. Este projeto combina eletrônica básica, programação e mecânica simples em uma experiência completa de aprendizado. O resultado final é um robô autônomo capaz de detectar obstáculos e navegar pelo ambiente de forma inteligente.
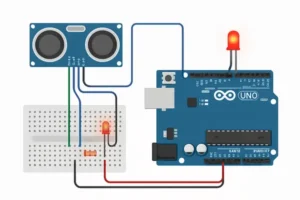
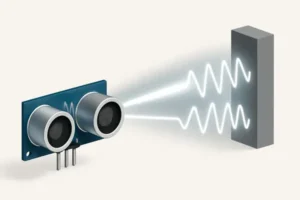
O sensor ultrassônico HC-SR04 funciona como os “olhos” do nosso robô, emitindo ondas sonoras e calculando distâncias com base no tempo de retorno do eco. Esta tecnologia, amplamente utilizada em carros autônomos e sistemas industriais, torna-se acessível através de componentes de baixo custo. O projeto completo pode ser finalizado em um fim de semana, mesmo por iniciantes absolutos.
A construção deste robô desenvolve habilidades fundamentais em Arduino, eletrônica e lógica de programação. Cada etapa foi projetada para ensinar conceitos específicos enquanto mantém o foco na funcionalidade prática. O investimento total fica abaixo de R$ 150, tornando este projeto acessível para qualquer orçamento de hobbyista.
Materiais Necessários
Componentes Eletrônicos Principais
Arduino Uno R3 – O cérebro do projeto, responsável por processar informações e controlar todos os componentes. Certifique-se de adquirir uma versão original ou clone confiável com chip ATmega328P. O consumo energético é de aproximadamente 20mA, ideal para projetos móveis.
Sensor Ultrassônico HC-SR04 – Elemento central para detecção de obstáculos. Opera na frequência de 40kHz com alcance efetivo entre 2cm e 4 metros. A precisão é de ±3mm, suficiente para navegação robótica básica.
Driver Motor L298N – Controla os motores DC permitindo movimento bidirecional e controle de velocidade via PWM. Suporta tensão de 5V a 35V e corrente máxima de 2A por canal.
Motores DC com Redução – Dois motores de 6V com caixa de redução garantem torque adequado para mover o chassi. Rotação típica de 200 RPM proporciona velocidade ideal para navegação controlada.
Estrutura e Alimentação
Chassi de Acrílico ou MDF – Base estrutural com dimensões aproximadas de 15x12cm. Material deve suportar peso total de 500g incluindo todos os componentes e bateria.
Rodas e Pneus – Rodas de 6cm de diâmetro com pneus de borracha para aderência. O terceiro ponto de apoio utiliza roda boba esférica para movimento omnidirecional.
Suporte para Baterias – Compartimento para 4 pilhas AA ou bateria 9V. Autonomia estimada entre 2-4 horas dependendo do uso contínuo dos motores.
Jumpers e Fios – Cabos macho-fêmea e macho-macho de 20cm para conexões. Cores padronizadas facilitam identificação: vermelho (alimentação), preto (terra), azul/verde (sinais).
Componentes Auxiliares
Protoboard – Placa de 400 pontos para conexões temporárias durante testes. Permite modificações rápidas sem soldagem permanente.
LED Indicador – LED verde para sinalizar funcionamento e LED vermelho para alertas. Resistores de 220Ω limitam corrente adequadamente.
Buzzer Ativo – Emissor sonoro de 5V para feedback auditivo durante navegação ou detecção de obstáculos.
Ferramentas Obrigatórias
Equipamentos de Medição
Multímetro Digital – Ferramenta essencial para verificar tensões, continuidade e diagnosticar problemas elétricos. Modelos básicos de R$ 30 atendem perfeitamente às necessidades do projeto.
Régua ou Trena – Medição precisa de distâncias para calibração do sensor ultrassônico. Precisão mínima de 1mm é recomendada para ajustes finos.
Ferramentas de Montagem
Chaves Phillips e Fenda – Tamanhos variados para fixação de componentes no chassi. Chaves magnéticas facilitam manuseio de parafusos pequenos.
Furadeira com Brocas – Furos de 3mm e 5mm para fixação de componentes. Broca escalonada permite ajuste preciso do diâmetro.
Alicate Desencapador – Preparação adequada de fios para conexões confiáveis. Ferramenta específica evita danos aos condutores.
Ferro de Solda 30W – Para conexões permanentes após testes bem-sucedidos. Temperatura controlada protege componentes sensíveis.
Preparação do Ambiente
Instalação do Arduino IDE
Acesse o site oficial do Arduino (arduino.cc) e baixe a versão mais recente do IDE para seu sistema operacional. A instalação padrão inclui todas as bibliotecas necessárias para este projeto. Configure a porta serial correta em “Ferramentas > Porta” após conectar o Arduino via USB.
Instale a biblioteca “NewPing” através do gerenciador de bibliotecas (Sketch > Incluir Biblioteca > Gerenciar Bibliotecas). Esta biblioteca otimiza o funcionamento do sensor HC-SR04 e oferece funções avançadas de medição.
Configuração do Workspace
Organize uma bancada com boa iluminação e ventilação adequada para trabalho com ferro de solda. Mantenha os componentes organizados em recipientes separados para evitar perdas ou confusões durante a montagem.
Prepare um caderno para anotações técnicas incluindo valores de medição, problemas encontrados e soluções aplicadas. Esta documentação será valiosa para projetos futuros e troubleshooting.
Montagem do Chassis
Preparação da Base
Marque os furos no chassi seguindo o template fornecido. A distância entre os eixos dos motores deve ser de 10cm para garantir estabilidade durante movimentos curvos. Posicione o sensor ultrassônico na parte frontal, centralizado e a 8cm de altura do solo.
Execute os furos com broca de 3mm, expandindo para 5mm onde necessário para parafusos maiores. Use uma morsa ou grampos para fixar o chassi durante a furação, evitando rachaduras no material.
Instalação dos Motores
Fixe os motores DC nas laterais do chassi usando brackets específicos ou suportes improvisados com chapas metálicas. Certifique-se que os eixos estão alinhados paralelos entre si e perpendiculares ao chassi.
As rodas devem ser instaladas com pressão suficiente para evitar deslizamento no eixo. Teste a rotação manual verificando se não há atrito excessivo ou desalinhamento que possa prejudicar o movimento.
Posicionamento da Roda Boba
Instale a roda boba na parte traseira, equidistante dos motores principais. A altura deve ser ajustada para manter o chassi nivelado com pequena inclinação frontal (2-3 graus) que melhora a detecção de obstáculos pelo sensor.
Teste o deslizamento da roda boba em diferentes superfícies. Lubrificação com óleo leve pode ser necessária para reduzir atrito e melhorar a manobrabilidade em curvas fechadas.
Instalação do Sistema de Controle
Montagem do Arduino
Fixe o Arduino Uno na parte superior do chassi usando espaçadores de 10mm para permitir ventilação adequada. A posição deve facilitar acesso às portas USB e de alimentação para programação e testes.
Utilize parafusos de 3mm com porcas auto-travantes para evitar folgas durante movimentos do robô. Verifique se nenhum parafuso interfere com componentes da placa ou causa curto-circuito.
Instalação da Protoboard
Posicione a protoboard próxima ao Arduino para minimizar comprimento dos jumpers. A fita dupla-face da protoboard deve aderir firmemente ao chassi, evitando movimentação durante operação.
Reserve as fileiras centrais para distribuição de alimentação (5V e GND) criando barramentos que facilitam conexões múltiplas. Marque visualmente estas linhas com fita isolante colorida.
Organização dos Cabos
Utilize abraçadeiras plásticas pequenas para organizar feixes de cabos e evitar interferência com partes móveis. Mantenha separação entre cabos de alimentação e sinais para reduzir ruído elétrico.
Identifique cada cabo com etiquetas ou fita colorida seguindo padrão consistente: vermelho (VCC), preto (GND), azul (sinais digitais), verde (sinais analógicos).
Configuração do Sensor Ultrassônico
Conexões Elétricas do HC-SR04
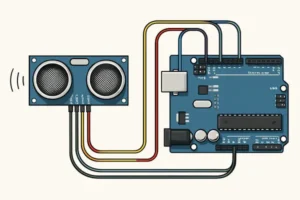
Pino VCC conecta ao 5V do Arduino ou barramento positivo da protoboard. Pino GND conecta ao terra comum do sistema. Pino Trig conecta ao pino digital 7 do Arduino. Pino Echo conecta ao pino digital 8 do Arduino.
Utilize jumpers de 15cm para permitir posicionamento flexível do sensor. Conexões firmes são cruciais – teste continuidade com multímetro antes de energizar o sistema.
Posicionamento Físico
Monte o sensor na parte frontal do chassi com suporte que permita ajuste de ângulo vertical. A altura ideal é entre 5-10cm do solo para detectar obstáculos baixos sem interferência do próprio chassi.
O sensor deve apontar ligeiramente para baixo (5-10 graus) para detectar desníveis e evitar leituras falsas causadas por reflexões no teto ou paredes distantes.
Calibração Inicial
Execute o código de teste básico para verificar leituras do sensor em diferentes distâncias. Compare com medições manuais usando régua para identificar desvios sistemáticos.
cpp
#include <NewPing.h>
#define TRIGGER_PIN 7
#define ECHO_PIN 8
#define MAX_DISTANCE 200
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
void setup() {
Serial.begin(9600);
}
void loop() {
delay(50);
int distance = sonar.ping_cm();
Serial.print("Distância: ");
Serial.print(distance);
Serial.println(" cm");
}Registre as leituras em superfícies diferentes (madeira, metal, tecido) para entender limitações do sensor. Materiais absorventes podem reduzir alcance efetivo.
Sistema de Locomoção
Conexão do Driver L298N
Alimentação: VCC do L298N conecta à bateria (6-9V). GND conecta ao terra comum. Sinais de Controle: IN1 e IN2 conectam aos pinos digitais 3 e 4 do Arduino (motor direito). IN3 e IN4 conectam aos pinos 5 e 6 (motor esquerdo). Enable Pins: ENA conecta ao pino PWM 9, ENB conecta ao pino PWM 10.
Instale capacitores de 100nF entre os terminais de cada motor para suprimir ruído elétrico que pode interferir no sensor ultrassônico. Esta prática é essencial para funcionamento estável.
Teste dos Motores
Implemente código de teste para verificar rotação correta de cada motor individualmente. Confirme que comandos “frente” produzem movimento para frente e “trás” para trás.
cpp
#define MOTOR_A_IN1 3
#define MOTOR_A_IN2 4
#define MOTOR_A_EN 9
#define MOTOR_B_IN1 5
#define MOTOR_B_IN2 6
#define MOTOR_B_EN 10
void setup() {
pinMode(MOTOR_A_IN1, OUTPUT);
pinMode(MOTOR_A_IN2, OUTPUT);
pinMode(MOTOR_A_EN, OUTPUT);
pinMode(MOTOR_B_IN1, OUTPUT);
pinMode(MOTOR_B_IN2, OUTPUT);
pinMode(MOTOR_B_EN, OUTPUT);
}
void moveForward() {
digitalWrite(MOTOR_A_IN1, HIGH);
digitalWrite(MOTOR_A_IN2, LOW);
digitalWrite(MOTOR_B_IN1, HIGH);
digitalWrite(MOTOR_B_IN2, LOW);
analogWrite(MOTOR_A_EN, 200);
analogWrite(MOTOR_B_EN, 200);
}Ajuste de Velocidade
Teste diferentes valores PWM (0-255) para encontrar velocidade ideal que balanceia capacidade de resposta com suavidade de movimento. Valores muito altos podem causar movimento errático.
Calibre velocidades individuais dos motores para compensar diferenças mecânicas. É comum um motor ser ligeiramente mais rápido, causando deriva durante movimento em linha reta.
Programação – Código Base
Estrutura Principal do Programa
cpp
#include <NewPing.h>
// Definições de pinos
#define TRIGGER_PIN 7
#define ECHO_PIN 8
#define MAX_DISTANCE 200
#define MOTOR_A_IN1 3
#define MOTOR_A_IN2 4
#define MOTOR_A_EN 9
#define MOTOR_B_IN1 5
#define MOTOR_B_IN2 6
#define MOTOR_B_EN 10
// Parâmetros de navegação
#define MIN_DISTANCE 15
#define TURN_TIME 500
#define SPEED 180
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
void setup() {
Serial.begin(9600);
// Configuração dos pinos dos motores
pinMode(MOTOR_A_IN1, OUTPUT);
pinMode(MOTOR_A_IN2, OUTPUT);
pinMode(MOTOR_A_EN, OUTPUT);
pinMode(MOTOR_B_IN1, OUTPUT);
pinMode(MOTOR_B_IN2, OUTPUT);
pinMode(MOTOR_B_EN, OUTPUT);
delay(2000); // Tempo para posicionamento inicial
}
void loop() {
int distance = sonar.ping_cm();
if (distance == 0) distance = MAX_DISTANCE;
if (distance > MIN_DISTANCE) {
moveForward();
} else {
stopMotors();
delay(100);
turnRight();
delay(TURN_TIME);
stopMotors();
delay(100);
}
delay(50);
}Funções de Movimento
cpp
void moveForward() {
digitalWrite(MOTOR_A_IN1, HIGH);
digitalWrite(MOTOR_A_IN2, LOW);
digitalWrite(MOTOR_B_IN1, HIGH);
digitalWrite(MOTOR_B_IN2, LOW);
analogWrite(MOTOR_A_EN, SPEED);
analogWrite(MOTOR_B_EN, SPEED);
}
void moveBackward() {
digitalWrite(MOTOR_A_IN1, LOW);
digitalWrite(MOTOR_A_IN2, HIGH);
digitalWrite(MOTOR_B_IN1, LOW);
digitalWrite(MOTOR_B_IN2, HIGH);
analogWrite(MOTOR_A_EN, SPEED);
analogWrite(MOTOR_B_EN, SPEED);
}
void turnLeft() {
digitalWrite(MOTOR_A_IN1, LOW);
digitalWrite(MOTOR_A_IN2, HIGH);
digitalWrite(MOTOR_B_IN1, HIGH);
digitalWrite(MOTOR_B_IN2, LOW);
analogWrite(MOTOR_A_EN, SPEED);
analogWrite(MOTOR_B_EN, SPEED);
}
void turnRight() {
digitalWrite(MOTOR_A_IN1, HIGH);
digitalWrite(MOTOR_A_IN2, LOW);
digitalWrite(MOTOR_B_IN1, LOW);
digitalWrite(MOTOR_B_IN2, HIGH);
analogWrite(MOTOR_A_EN, SPEED);
analogWrite(MOTOR_B_EN, SPEED);
}
void stopMotors() {
analogWrite(MOTOR_A_EN, 0);
analogWrite(MOTOR_B_EN, 0);
}Lógica de Navegação Avançada
cpp
void smartNavigation() {
int frontDistance = measureDistance();
if (frontDistance > MIN_DISTANCE) {
moveForward();
return;
}
stopMotors();
delay(200);
// Verifica direita
turnRight();
delay(300);
int rightDistance = measureDistance();
// Verifica esquerda
turnLeft();
delay(600);
int leftDistance = measureDistance();
// Retorna para posição central
turnRight();
delay(300);
// Decide direção baseada em medições
if (rightDistance > leftDistance && rightDistance > MIN_DISTANCE) {
turnRight();
delay(TURN_TIME);
} else if (leftDistance > MIN_DISTANCE) {
turnLeft();
delay(TURN_TIME);
} else {
// Sem saída - gira 180 graus
turnRight();
delay(TURN_TIME * 2);
}
stopMotors();
delay(100);
}
int measureDistance() {
int distance = sonar.ping_cm();
if (distance == 0) return MAX_DISTANCE;
return distance;
}Testes e Calibração
Verificação Sistemática
Execute testes individuais de cada componente antes da integração final. Verifique voltagens de alimentação, sinais de controle e continuidade de todas as conexões usando multímetro.
Teste o sensor ultrassônico em diferentes condições ambientais: superfícies lisas, rugosas, cantos, espaços abertos. Documente limitações encontradas para ajustar parâmetros do software.
Calibração de Parâmetros
Ajuste MIN_DISTANCE baseado no desempenho real do robô. Valores muito baixos causam colisões, valores muito altos resultam em comportamento excessivamente cauteloso.
Calibre TURN_TIME medindo ângulos reais de rotação. Use transferidor ou aplicativo móvel para medir precisão das curvas de 90 graus.
Testes de Autonomia
Meça duração da bateria em uso contínuo e standby. Implemente sistema de monitoramento de voltagem para alertar sobre bateria baixa antes da falha completa.
cpp
void checkBattery() {
int batteryLevel = analogRead(A0) * (5.0 / 1023.0);
if (batteryLevel < 3.5) {
// Sinal de bateria baixa
digitalWrite(LED_PIN, HIGH);
delay(100);
digitalWrite(LED_PIN, LOW);
delay(100);
}
}Teste navegação em diferentes ambientes: corredores, salas abertas, espaços com móveis. Identifique situações onde o robô apresenta dificuldades e ajuste algoritmo conforme necessário.
Resolução de Problemas
Problemas de Movimento
Robô não se move: Verifique alimentação dos motores, conexões do driver L298N e código de ativação dos pinos Enable. Use multímetro para confirmar 5V nos pinos ENA e ENB durante comandos de movimento.
Movimento irregular: Calibre velocidades individuais dos motores. Diferenças na caixa de redução podem causar deriva. Ajuste valores PWM para compensar.
Vibração excessiva: Verifique fixação das rodas, alinhamento dos eixos e balanceamento da carga no chassi. Componentes soltos podem causar vibrações que interferem no sensor.
Problemas no Sensor
Leituras inconsistentes: Verifique conexões do HC-SR04, especialmente pinos Trig e Echo. Interferência elétrica dos motores pode afetar medições – instale capacitores de filtragem.
Alcance reduzido: Confirme tensão de alimentação (5V) e limpeza da superfície dos transdutores. Objetos próximos podem causar reflexões múltiplas.
Leituras zero constantes: Problema comum em conexões frouxas ou código incorreto. Verifique definições de pinos e inclusão da biblioteca NewPing.
Problemas de Alimentação
Reinicializações espontâneas: Indica queda de tensão durante picos de consumo dos motores. Utilize bateria com maior capacidade ou implemente soft-start nos motores.
Aquecimento do regulador: Driver L298N pode aquecer com corrente alta. Verifique se motores não estão travados e considere uso de dissipador térmico.
Melhorias e Expansões
Upgrades de Hardware
Substitua o chassi de acrílico por alumínio para maior durabilidade. Adicione encoders nos motores para controle preciso de velocidade e posição.
Implemente sistema de carregamento automático usando contatos elétricos e estação base. Configure timer para retorno automático quando bateria atingir nível crítico.
Expansões de Software
Desenvolva algoritmo de mapeamento simples usando array bidimensional para representar ambiente explorado. Implemente busca de caminho otimizado para navegação eficiente.
Adicione conectividade WiFi usando ESP32 para controle remoto e monitoramento via aplicativo móvel. Transmita dados de sensores em tempo real.
Sensores Adicionais
Instale sensor de luz LDR para navegação baseada em iluminação. Adicione sensor de som para resposta a comandos de voz simples.
Incorpore câmera ESP32-CAM para visão computacional básica e reconhecimento de objetos. Implemente seguimento de linha usando array de sensores infravermelhos.
Conclusão
A construção deste robô educacional representa muito mais que um projeto de fim de semana. Cada componente instalado, cada linha de código escrita e cada teste realizado contribui para o desenvolvimento de habilidades técnicas fundamentais na era da automação.
O conhecimento adquirido neste projeto forma a base sólida para desenvolvimentos mais complexos em robótica, IoT e sistemas embarcados. As técnicas de troubleshooting, calibração e otimização são transferíveis para qualquer projeto eletrônico futuro.
Este robô funcional demonstra que tecnologias avançadas estão ao alcance de qualquer pessoa determinada a aprender. O investimento em conhecimento prático rende dividendos permanentes na carreira técnica e satisfação pessoal de criar soluções inovadoras.
Perguntas Frequentes
1. Qual é a autonomia real da bateria neste projeto?
Com 4 pilhas AA alcalinas, a autonomia típica varia entre 2-4 horas dependendo da intensidade de uso dos motores. Movimento contínuo reduz autonomia, enquanto pausas frequentes para medição estendem a duração. Baterias recarregáveis NiMH oferecem melhor relação custo-benefício a longo prazo.
2. O sensor HC-SR04 funciona adequadamente em ambientes externos?
O sensor funciona bem em ambientes externos durante o dia, mas pode apresentar interferências com luz solar direta intensa. Vento forte pode afetar medições de distância. Para uso externo regular, considere adicionar proteção contra intempéries e calibração específica para condições ambientais variáveis.
3. É possível usar este projeto como base para competições de robótica?
Absolutamente. Este projeto fornece fundação sólida para competições escolares e universitárias. As principais adaptações necessárias incluem melhoria na precisão de movimento, adição de sensores específicos da modalidade e otimização do algoritmo de navegação para desafios específicos da competição.
4. Quais são os principais riscos de segurança durante a construção?
Os principais cuidados envolvem uso adequado do ferro de solda (queimaduras), manuseio correto de ferramentas perfurantes (cortes) e conexões elétricas seguras (curto-circuitos). Sempre desconecte a alimentação antes de modificar circuitos e use óculos de proteção durante furação do chassi.
5. Como expandir este projeto para incluir inteligência artificial básica?
A expansão para IA pode ser implementada gradualmente: começe com algoritmos de aprendizado de padrões de movimento, adicione reconhecimento de objetos usando câmera, implemente redes neurais simples para tomada de decisão e desenvolva sistema de memória para otimização de rotas baseada em experiência acumulada.